| NihilScio | .NS ©2009 |
| Nihil Scio, Sed Unum Scio, Nihil Scire | Motore di ricerca tematico |
<-- Generalità Pilotaggio -->
CLASSIFICAZIONE
Esistono in commercio diversi tipi diversi di motori passo-passo. Essi possono essere raggruppati in famiglie o classificati in funzione di tre diversi parametri :
1. il numero delle fasi presenti nello statore.
2. il tipo di tecnologia per la realizzazione del rotore ;
3. il senso di circolazione della corrente negli avvolgimenti di ciascuna delle fasi statoriche .
In funzione del numero delle fasi i motori passo passo possono essere classificati in motori monofase e polifase.
I motori passo-passo polifase
I tipi attualmente impiegati sono i motori a magnete permanente, quelli a riluttanza variabile e quelli di tipo ibrido.
Ø Motori passo-passo a magnete permanente (pm):
Questo è un motore nel quale la struttura rotorica è costituita da materiale del magnete permanente
magnetizzato radialmente.
La struttura statorica è composta da un pacco di lamierini e presenta vari poli salienti; nei motori
con molti poli magnetizzati sul rotore la struttura statorica viene semplificata per ridurre il costo e
l'ingombro. Il numero di passi interi per giro realizzabile con questo tipo di motore è usualmente
abbastanza basso: da 8 a 48.
Ø Motori passo-passo a riluttanza variabile (la riluttanza misura l'opposizione di un materiale al transito di un flusso magnetico. Essa è definita come rapporto tra la forza magnetomotrice (f.m.m.) applicata ad un circuito magnetico e il flusso di induzione da essa generato e concatenato con il circuito). (vr):
La legge di Hopkinson
La relazione lineare tra f.m.m. e flusso di induzione è detta legge di Hopkinson e costituisce per i circuiti magnetici l'analogo della legge di Ohm per i circuiti elettrici; essa si scrive:
E' chiaro che la riluttanza
fra due punti di un circuito magnetico dipende sia dalla lunghezza fra i due
punti, sia dalla sezione S in quei due punti e sia dal materiale.
In definitiva la formula per calcolarci la
riluttanza e' la seguente:
l
R= --------
mS
cioè la riluttanza e' tanto maggiore quanto più grande e' la lunghezza l; quanto più grande e' la sezione S la riluttanza diventa più piccola, perché c'e' più spazio per il flusso; m tiene conto del tipo di materiale ed è detta permeabilità magnetica o permeanza e ci indica l'attitudine del materiale a farsi attraversare dal flusso, riluttanza  ha unità di misura Henry-1 .
Questo è un motore nel quale la struttura rotorica, è generalmente costituita da un cilindro di ferro scanalato; lo statore è invece costituito da un pacco di lamierini a poli dentati.
Il principio di funzionamento di questo motore differisce da quello descritto in precedenza infatti, a seguito dell'alimentazione degli avvolgimenti delle fasi, la struttura rotorica si porta in una posizione a riluttanza minima.
E' importante osservare che per l'assenza di una magnetizzazione proprio della struttura rotorica, il motore a riluttanza variabile necessita di almeno 3 fasi per poter funzionare correttamente; il rotore può muoversi indifferentemente in senso orario, antiorario oppure non spostarsi affatto. Il comportamento di un tale motore risulta pertanto irregolare.
Per questo tipo di motore il numero di passi interi per giro è compreso nel campo 12-72.
Motori a passo a riluttanza variabile
Sulla superficie interna dello statore (è la parte fissa della macchina) sono presenti nS denti uniformemente distribuiti. Su ogni coppia di denti diametralmente opposti è presente un avvolgimento che costituisce una fase della macchina. Quindi sullo statore si ha un numero di fasi pari:
 |
Il rotore è di ferro dolce e presenta sulla superficie esterna un numero di denti nr pari a:
 |
Per spiegarne il principio di funzionamento si prende in esame il motore rappresentato in Fig. 5.2.a con nS = 6, nr = 4 e q = 3, con le fasi contraddistinte dalle lettere A, B e C.Si parte dalla configurazione rappresentata in Fig. 5.2.a. Si alimenta solo la fase A con una corrente costante iA = I (iB = iC = 0). Nasce un campo magnetico le cui linee di flusso sono dirette dal polo N (le linee sono uscenti dal polo Nord) al polo Sud. Queste linee di flusso seguono un percorso di minima riluttanza e quindi tendono a passare attraverso i denti del rotore che sono prossimi alla fase A, anziché muoversi lungo il diametro che congiunge i due denti della fase eccitata (Fig. 5.2.b).
A causa di ciò i denti di rotore interessati dal flusso magnetico vengono magnetizzati (fenomeno di polarizzazione magnetica) e quindi si creano dei poli magnetici indotti: dove le linee di flusso entrano si crea un Sud, da dove escono si crea un Nord (Fig. 5.2.b). I poli magnetici di statore e di rotore interagiscono: si creano delle forze di attrazione tra poli di segno opposto e quindi una coppia elettromotrice (Cem) che fa ruotare il rotore di un angolo θ, detto passo angolare (osservare il movimento del punto P) in modo da allineare i poli di segno opposto (Fig. 5.2.c). Il principio di funzionamento è a minima riluttanza: quando la corrente di eccitazione percorre l’avvolgimento statorico A, il rotore si dispone in modo da offrire la minima riluttanza magnetica (cioè la massima induttanza e il massimo flusso).
 |
Se adesso si diseccita la fase A e si alimenta la B (iB = I, iA = iC = 0) si avrà una situazione identica a quella descritta precedentemente e al termine del transitorio il rotore avrà compiuto un altro passo angolare (Fig. 5.2.d). Alimentando in sequenza le varie fasi il rotore compie un moto continuo (Fig. 5.3). Ogni volta che varia la fase alimentata il rotore si sposta di un passo. Se cambia il verso di alimentazione (da A-B-C a C-B-A) delle fasi statoriche, cambierà il verso di rotazione del motore. Da notare che se la sequenza di alimentazione delle fasi è (AB- C), ossia in senso antiorario, si ha una rotazione del rotore in senso orario.
 |
Quindi il motore presenta un’opportuna logica di controllo in modo da alimentare le fasi nella sequenza corretta (Fig. 5.4). Un parametro importante del motore è la frequenza massima di funzionamento del motore: tra un impulso e l’altro deve trascorrere un certo tempo per consentire al rotore di compiere il passo polare. Se tale limite non è rispettato c’è il rischio che il motore perda il passo.
 |
Il fatto che il numero dei denti di rotore differisce da quello di statore secondo la relazione (5.2) garantisce che non si potrà mai verificare la situazione in cui i denti di statore sono già allineati a quelli della fase che deve essere alimentata (se si verificasse ciò ovviamente non si avrebbe la rotazione angolare e il motore sarebbe in stallo).Si determina il passo angolare (θ). Si definiscono le seguenti grandezze:
 |
L’angolo di passo è:
 |
Nel caso in esame con ns = 6 e nr = 4 si ha θ = 30°, quindi ad ogni impulso il rotore compie una rotazione di 30°.
Quello descritto è il funzionamento del motore a singolo passo, poiché si alimenta una sola fase alla volta. Nel funzionamento detto a multipasso si alimentano più fasi contemporaneamente. Modulando in modo opportuno le correnti nelle singole fasi si riesce a far sì che il campo magnetico risultante sia posizionato in modo intermedio tra le fasi e quindi è possibile far compiere rotazioni inferiori al passo angolare. Ad esempio, ritornando al caso in esame, alimentando contemporaneamente le fasi A e B con due correnti uguali, il campo risultante è posizionato nella mezzeria tra i due denti e quindi il motore ruoterà di un angolo pari a metà del passo angolare. Per ottenere un passo angolare ridotto (inferiore al 1/100 di grado) occorre avere un numero elevato di fasi e applicare la strategia di controllo multipasso).
Ø Motori passo-passo ibrido (hy)
Il motore ibrido unisce alcune caratteristiche del motore a riluttanza variabile e di quello a magnete permanente; sfruttando un rotore costituito da nuclei di ferro dentati circondato da un magnete permanente e uno statore composto da lamierini a poli dentati riesce ad ottenere un elevato numero di passi per giro tipicamente da 100 a 400.
Tra i tre tipi i migliori sono i motori ibridi e per tale motivo la quasi totalità di quelli oggi reperibili sono proprio di questo tipo; per cui mi limiterò a descrivere brevemente la struttura di questi ultimi.
Un motore ibrido è costituito da un rotore e da uno statore; nella fotografia seguente riporto un esemplare non particolarmente recente ma in cui si vede chiaramente la struttura.
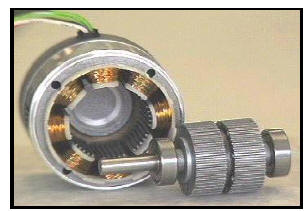 |
Il rotore appare come una coppia di ruote dentate affiancate e solidali all'albero (i "denti" sono chiamati coppette) costituite da un nucleo magnetico (le due ruote sono permanentemente magnetizzate, una come NORD, l'altra come SUD) e le coppette in materiale ferromagnetico. Il numero di denti è variabile ma 50 è in assoluto il più frequente. Tra le due ruote è presente uno sfasamento esattamente pari ad 1/2 del passo dei denti: il dente di una delle due sezione corrisponde quindi alla valle dell'altra. Nel rotore non sono presenti fili elettrici e quindi manca completamente ogni connessione elettrica tra la parte in movimento e quella fissa. In genere il rotore è montato su cuscinetti a sfera, anche nei modelli economici.
Lo statore appare come il classico insieme di avvolgimenti ed il circuito magnetico è costituito da 4 o più frequentemente 8 "espansioni polari" (otto in quello mostrato fotografia). All'interno dello statore sono presenti piccoli denti che si affacciano esattamente a quelli del rotore. O meglio, sono esattamente affacciati al rotore solo il gruppo di denti appartenenti ad una espansione polare e a quella opposta; le altre coppie sono sfalsate rispettivamente di 1/4, 1/2 e 3/4 del passo dei denti. Avvolti intorno ai poli magnetici dello statore ci sono i fili che, opportunamente percorsi da corrente, generano il campo magnetico.
All'esterno sono evidentemente presenti le alimentazioni dei vari avvolgimenti; in pratica le fasi possono essere avvolte secondo due schemi:
Sono presenti due soli avvolgimenti (avvolti su più espansioni polari) e quindi all'esterno arrivano due sole coppie di fili: in questo caso si parla di motori bipolari in quanto la corrente dovrà percorrere le fasi nei due versi al fine di creare gli opportuni campi magnetici.
Sono presenti quattro avvolgimenti avvolti a coppie, in antiparallelo, sulle espansioni polari; all'esterno arrivano almeno cinque fili (spesso sono infatti presenti delle connessioni interne al motore tra le varie fasi). Si parla in questo caso di motori unipolari in quanto la corrente nella singola fase ha sempre lo stesso verso. E' possibile creare due campi magnetici opposti semplicemente scegliendo in quale dei fili debba passare la corrente.
 Struttura e principio di funzionamento dei principali tipi di motore passo passo a = con rotore a magnete permanente b = a riluttanza variabile c = ibridi |
Motori unipolari e bipolari
 |
Alcuni motori presenti in commercio presentano però più di quattro fili. Perché mai? La risposta è da ricercare nella modalità di avvolgimento dei conduttori fra le varie espansioni polari dello statore, ciò che condiziona anche le possibilità di pilotaggio. Infatti, il motore che abbiamo finora analizzato è quello di tipo “bipolare”, così avvolgimenti e quindi di far fluire la corrente in entrambe le direzioni. Alcuni motori sono invece avvolti in modo da possedere una configurazione interna quale quella di figura 5 , ottenuta rendendo disponibile esternamente il punto centrale del filo di passaggio fra le due fasi opposte dello statore (A e B da un lato, C e D dall’altro) in modo da disporre di un totale di 6 fili, di cui quattro sono le normali fasi, e due “prese centrali”. Alcuni tipi di motori dispongono di soli 5 fili, dove 4 sono le fasi A, B, C e D e il quinto è dato dall’unione delle due prese centrali V+. Con questa configurazione si offre una possibilità in più, ovvero se si desidera utilizzare il motore come se fosse di tipo bipolare, allora è sufficiente ignorare il due fili aggiuntivi e lasciarli sconnessi. Se invece i fili (o il filo) V+ viene collegato ad una tensione di alimentazione, allora si trasforma il motore in “unipolare”, ovvero si fa sì che la corrente negli avvolgimenti fluisca solo dal terminale V+ ad una delle fasi, senza la possibilità di invertire il verso della corrente. A che serve tutto ciò? Semplice: una soluzione di questo tipo permette di semplificare il circuito di pilotaggio riducendone il costo.
In
figura sono rappresentate schematicamente le connessioni per i due tipi di
motori.
 |