| NihilScio | .NS ©2009 |
| Nihil Scio, Sed Unum Scio, Nihil Scire | Motore di ricerca tematico |
<-- Classificazione
Il pilotaggio a singola fase o “a onda”
Date queste premesse, si immagini di fornire tensione al conduttore A, collegando B a massa e lasciando scollegate le fasi C e D: a causa della magnetizzazione delle espansioni polari connesse alle fasi A e B il magnete permanente del rotore ruoterà, orientandosi in modo da allineare le proprie espansioni polari Nord e Sud nella direzione A-B, come mostrato in figura.
Se successivamente si toglie tensione alla fase A e la si commuta alla fase C in modo da alimentare il percorso di corrente da C a D, il rotore ruoterà in senso orario di un quarto di giro allineandosi lungo la direzione C-D. Per provocare un ulteriore avanzamento si fornirà tensione alla fase B, poi alla D e così via, provocando una continua rotazione dell’asse del motore. La sequenza degli impulsi elettrici da fornire è quella evidenziata in figura 2 (corrispondente a due giri del motore), dove le varie sequenze sono sincronizzate da un clock,
Il segnale è costituito da un livello di tensione che periodicamente in modo regolare fa una rapida transizione dal valore zero ad un valore che generalmente coincide con la tensione di alimentazione del circuito, resta a questo livello per un certo tempo e poi in modo altrettanto rapido ritorna a livello zero, rimane a livello zero per un determinato tempo e poi il ciclo si ripete. La commutazione di tutti i circuiti logici avviene durante la transizione di questa tensione, ovverosia durante la variazione di livello di questo segnale. Gli ingressi dei dispositivi preposti a ricevere il clock sono definiti per consuetudine "attivi alti" o "attivi negati", i primi commutano durante il fronte di salita del clock, i secondi sul fronte di discesa. Non necessariamente il duty cycle del segnale deve essere simmetrico, un clock di 100 Mhz può essere costituito da un segnale che sta a livello alto 3 nanosecondi e rimane a zero 7 nanosecondi, o viceversa.) il cui periodo determina ovviamente la frequenza di ripetizione degli impulsi,e quindi la velocità di rotazione del motore. Come si può dedurre dal tipo di pilotaggio, le quattro fasi A, B, C e D non sono fra di loro equivalenti, bensì richiedono una sequenza di pilotaggio ben precisa. Per questo motivo, un erroneo collegamento anche di una sola delle fasi determina l’avanzamento irregolare o addirittura il blocco del motore. Questo tipo di pilotaggio è detto “a singola fase” o “a onda” (wave drive).
|
|
Il pilotaggio a due fasi
Un altro modo di pilotare il motore è quello di alimentare contemporaneamente due fasi, ad
esempio A e C: in tal modo il rotore si allinea in una direzione intermedia fra le due espansioni polari dello statore. Lo scopo di questa doppia alimentazione è quello di ottenere una forza di attrazione magnetica più intensa fra statore e rotore, e quindi una maggior coppia meccanica di rotazione per il motore.Questa tecnica viene detta per tale motivo “pilotaggio a due fasi” (two phases drive). Con questa tecnica, per fare avanzare il motore in senso orario è necessario fornire sequenze di impulsi del tipo A-C, poi C-B, in seguito B-D ei nfine D-A, in modo da provocare la completa rotazione dell’asse, ma sempre con il polo Nord del rotore allineato in una posizione intermedia fra due fasi. In figura 3 è mostrata la sequenza degli impulsi richiesti con le rispettive posizioni assunte dal rotore. Con entrambe le tecniche è comunque necessario garantire la corretta sequenza degli impulsi, senza omettere alcuna sequenza, pena l’avanzamento irregolare del motore. E’ ovvio che l’inversione del senso di rotazione del motore viene ottenuto inviando al motore sequenze di impulsi invertite, ovvero come se fossero “lette da destra a sinistra” rispetto a quelle ora descritte.
 |
L’avanzamento a mezzo passo
Si può osservare che è possibile alternare le due sequenze: ad esempio si può alimentare prima A, poi la coppia A-C, poi C, poi la coppia B-C, poi B, e così via. Che cosa si ottiene?Semplice, il rotore si allinea dapprima verso A, poi in posizione intermedia fra A e C, poi verso C, poi in posizione intermedia fra C e B, poi verso B, e così via. Lo scopo? Quello di far compiere al rotore movimenti “a mezzo passo”, e quindi attuare posizionamenti più precisi, anche se con una complicazione della sequenza degli impulsi (vedi figura 4).
 |
Abbiamo visto che per un motore ideale a 4 espansioni polari è possibile compiere passi di un quarto di giro (90 gradi) oppure – attuando un controllo a mezzo passo – di un ottavo di giro, ovvero 45 gradi. In un motore reale il numero di espansioni polari è maggiore, ma sempre multiplo di quattro, in modo da utilizzare esternamente solo 4 fili. Per tale motivo gli avvolgimenti sono connessi in parallelo quattro a quattro (il primo con il quinto, il secondo con il sesto, e così via). Grazie a questo accorgimento le sequenze di impulsi evidenziati nelle figure 2, 3 e 4 rimangono invariate anche per motori da decine o centinaia di passi. E’ ovvio che all’aumentare del numero di passi si ridurrà progressivamente l’angolo di rotazione per ogni passo, che solitamente va da 1.8 ai 9 gradi. Per questi motori, quindi, per poter compiere un giro completo sarà necessario ripetere più volte le combinazioni sopra descritte.
I circuiti di controllo
Al fine di fornire alle quattro fasi A, B, C, D del motore passo-passo la corretta sequenza di impulsi è necessario utilizzare circuiti logici pilotati da un generatore di clock, eventualmente variabile al fine di controllarne la velocità. E’ possibile sfruttare un generatore di clock basato ad esempio su di un oscillatore astabile a 555 seguito da un divisore e da una rete logica che ricavi i segnali necessari. Questi segnali non potranno però essere utilizzati direttamente per il pilotaggio del motore, ma richiederanno un’amplificazione della corrente ed un’eventuale innalzamento della tensione, a seconda del tipo di motore utilizzato. Lo schema a blocchi generico è quello mostrato in figura
 |
E’ ovvio comunque che è possibile realizzare tutte le necessarie funzioni richieste per la generazione dei segnali tramite un microcontroller, (Il microcontrollore o microcontroller o MCU (MicroController Unit) è un dispositivo elettronico integrato su singolochip, nato come evoluzione alternativa al Microprocessore ed utilizzato generalmente in sistemi embedded ovvero per applicazioni specifiche (special purpose) di controllo digitale.È progettato per interagire direttamente con il mondo esterno tramite unprogramma residente nella propria memoria interna e mediante l'uso di pinspecializzati o configurabili dal programmatore. Sono disponibili in 3 fasce di capacità elaborativa (ampiezza del bus dati): 8 bit, 16 bit e 32 bit.L'ampia gamma di funzioni di comando e controllo disponibili, sia analogiche che digitali, integrate sullo stesso chip, permette l'impiego delle MCU in sostituzione di schede elettroniche cablate tradizionali ben più complesse e costose.)
il quale necessita solo del driver (In informatica, è detto driver l'insieme di procedure, spesso scritte in assembly, che permette ad un sistema operativo di pilotare un dispositivo hardware. Il driver permette al sistema operativo di utilizzare l'hardware senza sapere come esso funzioni, ma dialogandoci attraverso un'interfaccia standard, i registri del controllore della periferica, che astrae dall'implementazione dell'hardware e che ne considera solo il funzionamento logico. In questo modo hardware diverso costruito da produttori diversi può essere utilizzato in modo intercambiabile. Ne consegue che un driver è specifico sia dal punto di vista dell'hardware che pilota, sia dal punto di vista del sistema operativo per cui è scritto. Non è possibile utilizzare driver scritti per un sistema operativo su uno differente, perché l'interfaccia è generalmente diversa. Il driver è scritto solitamente dal produttore del dispositivo hardware, dato che è necessaria un'approfondita conoscenza dell'hardware per poter scrivere un driver funzionante. A volte, i driver vengono scritti da terze parti sulla base della documentazione tecnica rilasciata dal produttore, se questa è disponibile.)di potenza per il pilotaggio del motore. In commercio sono comunque disponibili circuiti di controllo specifici, che richiedono solo pochi componenti esterni ed eventualmente il solo driver di potenza.
Nella scelta o nella progettazione dei vari tipi possibili di circuiti di pilotaggio, l’unica variabile che è necessario predeterminare è il tipo di motore da controllare, che condiziona la tipologia del driver di potenza. Infatti, a seconda che il motore prescelto sia unipolare o bipolare, il circuito driver deve essere adeguato. Nel caso di motore unipolare, il driver deve unicamente assorbire corrente da ciascuna fase verso massa, mentre se il motore è bipolare, il driver deve sia assorbire che erogare corrente, proprio per invertire il senso della corrente. I corrispondenti schemi di principio sono quelli riportati in figura
 |
Nel caso del motore unipolare i transistor (indicati come interruttori e deviatori) polarizzano una fase alla volta, mentre per il motore bipolare commutano simultaneamente in modo da invertire il verso della corrente.
IL PROBLEMA DELLA MASSIMA VELOCITA’
Ciascun avvolgimento di un motore passo-passo è equivalente dal punto di vista elettrico ad un induttore in serie ad un resistore.
Il problema sorge dal fatto che, in questo tipo di macchina, durante la rotazione la corrente deve passare continuamente da un valore zero al valore nominale; se il motore deve ruotare velocemente,queste commutazioni devono ovviamente essere rapide. Purtroppo la velocità di commutazione è limitata dalla costante di tempo (indicata dalla lettera greca Tau) del circuito R-L che rappresenta l'avvolgimento stesso.
Dalla teoria è noto che un induttore tende a mantenere costante la corrente che scorre in esso. Applicando una tensione a gradino ad un induttore la corrente aumenta secondo una curva esponenziale la cui durata dipende dalla costante di tempo tau.
 |
dove La è l'induttanza (in henry) ed Ra la resistenza (in ohm) equivalente dell'avvolgimento. In genere non è possibile agire su La per diminuire tale tempo in quanto dipende da come il motore è costruito. Come per tutti i motori elettrici, la coppia meccanica disponibile è proporzionale alla corrente che attraversa gli avvolgimenti. Questo significa che durante la carica dell'induttore che costituisce una fase non tutta la coppia teorica del motore è subito disponibile. O anche che, quando la corrente deve andare a zero, in realtà ci va lentamente, tentando di "frenare" il motore. Un effetto è che quando la velocità di rotazione del motore aumenta l'assorbimento di corrente e la coppia meccanica disponibile diminuiscono. Ciò limita la massima velocità di rotazione a valori piuttosto piccoli, soprattutto nei motori ad elevato numero di passi/giro. Esistono diverse tecniche per ridurre il tempo di commutazione e quindi aumentare la velocità di rotazione: aumentare la resistenza, oppure usare una doppia tensione di alimentazione. Delle due tecniche la prima è la più usata per i motori passo-passo ed è piuttosto semplice da realizzare anche se inefficiente dal punto di vista energetico.
Aumentare la resistenza
Osservando la relazione sopra riportata si vede come, per diminuire la Tau, basti aumentare la Ra: la resistenza da utilizzare nella formula del tempo di carica è quella dell'avvolgimento sommata ad una eventuale resistenza esterna da porre in serie all'avvolgimento stesso.
1)caso → è presente solo La e Ra
2)caso → è presente La e Ra + Rext
 |
Nella prima delle due situazioni è presente solo l'induttanza La e la resistenza Ra equivalenti dell'avvolgimento, parametri non modificabili senza costruire un nuovo motore; il tempo necessario perché la corrente arrivi al suo massimo dipende dalla già citata formula:
 |
Nella figura il tempo necessario è qualitativamente rappresentato in verde; la linea nera rappresenta l'andamento "ideale".
Nel secondo caso dove viene aggiunta in serie all'avvolgimento una resistenza esterna, il tempo di carica dipende da:
 |
Il tempo evidentemente minore. Nella figura è rappresentato in rosso l'andamento della corrente nel caso in cui Ra = Rext: si noti il dimezzamento del tempo necessario per far aumentare la corrente. Esiste un difetto di questo metodo: per ottenere la stessa corrente sia nel caso di assenza che di presenza del resistenza esterna, devo avere tensioni di alimentazioni diverse. Per esempio, se intendo usare una Rext pari alla Ra, devo raddoppiare la tensione di alimentazione, raddoppiando quindi la potenza elettrica da fornire. La potenza in eccesso viene dissipata come calore dai resistori esterni che devono quindi essere opportunamente dimensionati.
Il funzionamento con doppia alimentazione
Questo metodo, applicato ormai raramente con i motori passo-passo, consiste nell'usare due diverse tensioni di alimentazioni: una più elevata, da usare nella prima fase al fine di accelerare la salita della corrente , una minore e sufficiente al mantenimento della corrente a regime. Il sistema è piuttosto complesso dal punto di vista dell'elettronica di pilotaggio ed il fatto di richiedere due diverse alimentazione lo rende poco pratico. Inoltre al momento dello spegnimento, la corrente diminuisce lentamente, con impatti negativi sulle prestazioni.
I CAMBI DI VELOCITA’
Il motore passo-passo soffre di diversi problemi nel momento in cui viene effettuato il cambio di velocità. Infatti tutti i dispositivi meccanici, a causa dell'inerzia, non possono subire accelerazioni troppo brusche.
Un classico motore elettrico reagisce alla richiesta di improvviso aumento di velocità con un momentaneo aumento dell'assorbimento di corrente ed un graduale e relativamente lento aumento di velocità. Nel momento in cui improvvisamente cambia la frequenza in ingresso al dispositivo di pilotaggio del motore passo-passo, lo stepper (passo) tenta di adeguarsi quasi istantaneamente alla nuova velocità:
se la coppia disponibile è sufficiente vi è una brusca accelerazione, praticamente istantanea;
se la coppia non basta a vincere l'inerzia e gli attriti, semplicemente il motore si ferma e, senza un intervento esterno, non è più in grado di ripartire: si dice che il motore "ha perso il passo".
Questo comportamento è descritto dal seguente grafico con il legame tra coppia e velocità.
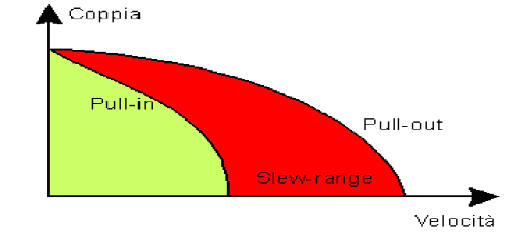 |
Ø PULL-IN: Un curva identifica l'area, disegnata in verde, entro cui il motore può subire cambi di
velocità e inversioni di marcia senza precauzioni particolari: è sufficiente cambiare la frequenza con
cui sono applicate le correnti alle fasi.
Ø PULL-OUT: La zona indicata in rosso e chiamata slew-range può essere attraversata solo a
condizione di evitare bruschi cambiamenti di velocità. Il cambiamento di frequenza deve quindi
essere continuo e tanto più lento quanto più ci si allontana dalla curva di pull-in.
Ø PULL-OUT: La curva di pull-out indica qual’è la massima coppia resistente che può essere
applicata al motore in rotazione ad una data velocità costante senza causare il blocco. In pratica
rappresenta le massime prestazioni del motore.
Il grafico rappresentato dipende non solo dal motore ma anche dai dispositivi meccanici ad esso collegati (un aumento del momento di inerzia del carico causa un restringimento dell'area di pull-in) e dal tipo di pilotaggio (un migliore gestione delle correnti aumenta entrambe le curve, soprattutto alle velocità più elevate).
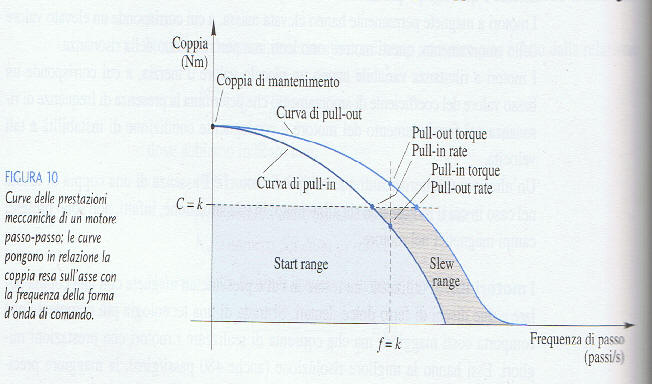 |
Inoltre da quanto detto risulta evidente che,all’avviamento, i valori della coppia e di frequenza di passo del motore devono essere nella zona delimitata dalla curva pull-in (start-range), mentre in rotazioni tali valori possono trovarsi nella zona compresa tra le due curve (slew-range). In nessun caso essi si possono trovare all’esterno della curva di pull-out: se ciò accade il motore perde i passi e non risulta quindi in sincronismo con la frequenza di passo della forma d’onda di comando. Per questo motivo, all’atto dell’avviamento del motore passo-passo si usano particolari sequenze di impulsi di comando fino a che la velocità non raggiunge il valore di regime. Tracciando sulle curve di prestazione una parallela all’asse delle frequenze (per coppia costante C=k), intersechiamo le due curve in due punti. Un’intersezione con la curva di pull-in individua la massima frequenza di passo all’avviamento per quella data coppia, detta pull-in rate. Un’intersezione con la curva di pull-out individua invece la massima frequenza di passo in movimento per quella data coppia, detta pull-out rate.
Tracciando una parallela all’asse delle coppie (per frequenza costante f=k) individuiamo, per quella data frequenza di passo, la coppia sincronizzante o pull-in torque e la coppia sincrona(detta anche pull out torque)
Bibliografia:
Le informazioni per questa tesina sono state tratte da:
www.itiomar.it/pubblica/Telecomunicaz/lezioni/4_anno/motori_P-P.pdf